get_color()
Block#

Description#
This functions reads the color data from either of the two bottom color sensors and returns one of the 8 pre-calibrated colors (provided in the color cards). The drone must be flat on a surface (not flying) for the color sensor to activate.
Parameters#
 type: front, back
type: front, back
Returns#
color: detected color as a string (Red, Green, Yellow, Blue, Cyan, Magenta, Black, White, Unknown)
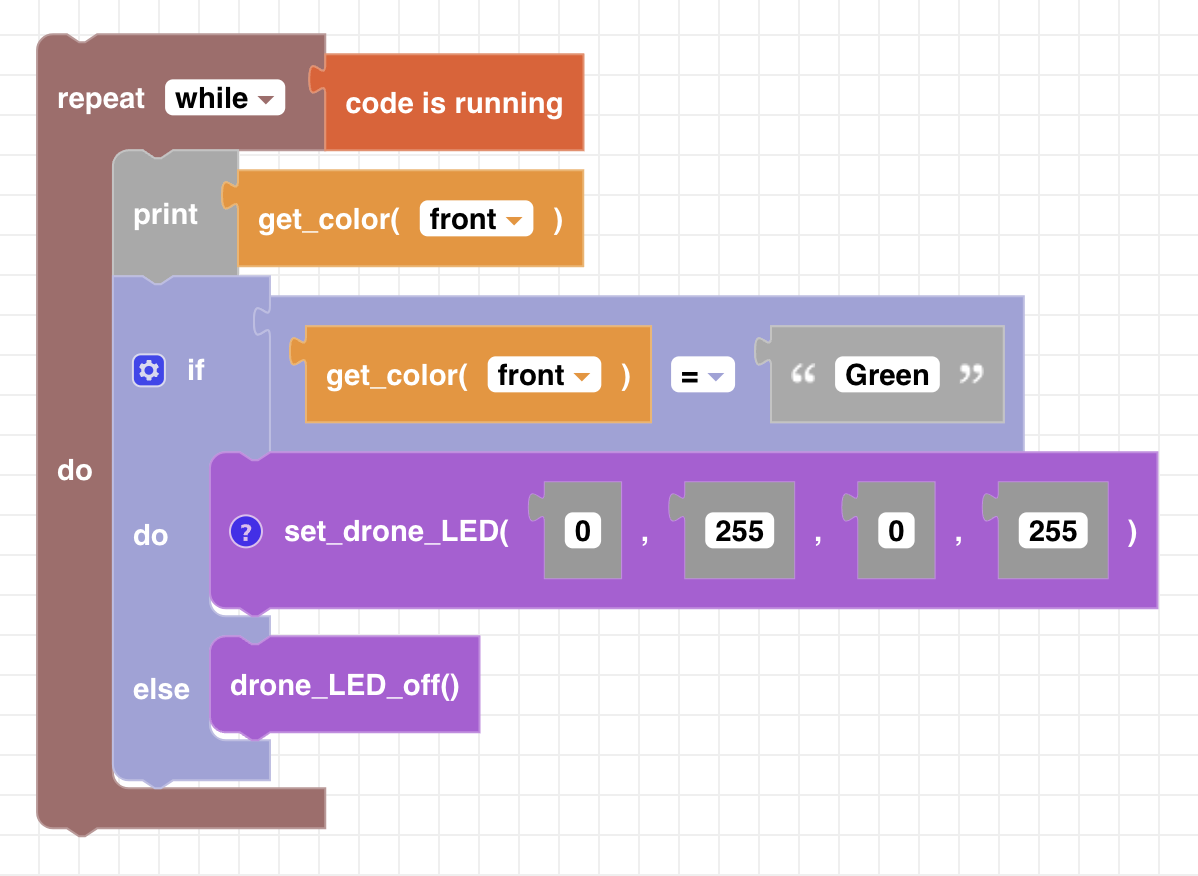
Example#