get_pos_y()
Description#
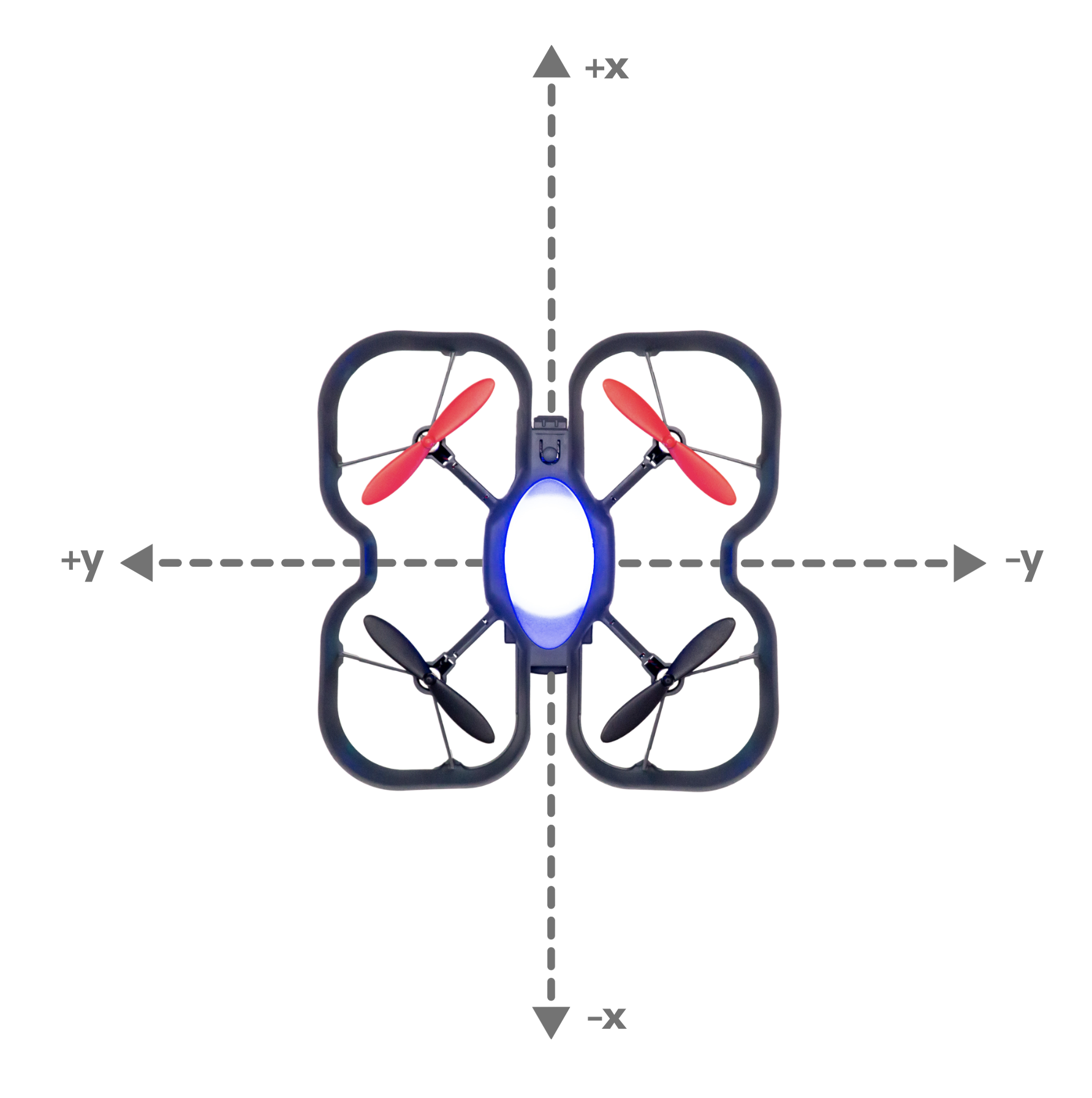
Getter function that gets the y position of the drone. (y is left and right)
Syntax#
get_pos_y()
get_pos_y(unit="<cm, in, mm, m>)
Parameters#
unit: The unit of measurement that is chosen for the position distance. Available units are "m" (meter), "cm" (centimeter), "mm" (millimeter), or "in" (inch). If a parameter is not specified cm is chosen by default.
Returns#
The current y position of the drone.