get_position_data()
Description#
get_position_data is a getter function that retuns a list of position data for the drone.
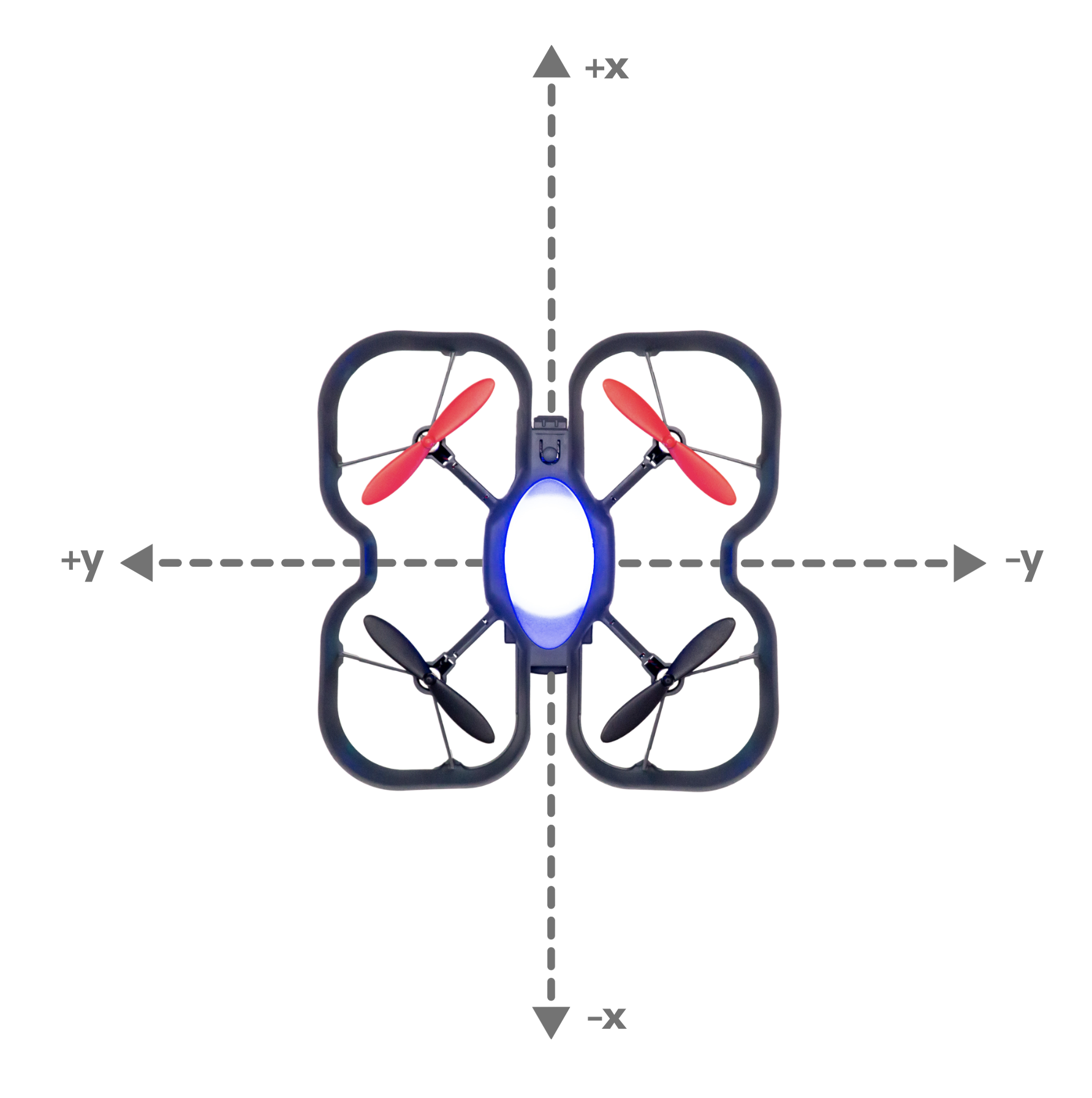
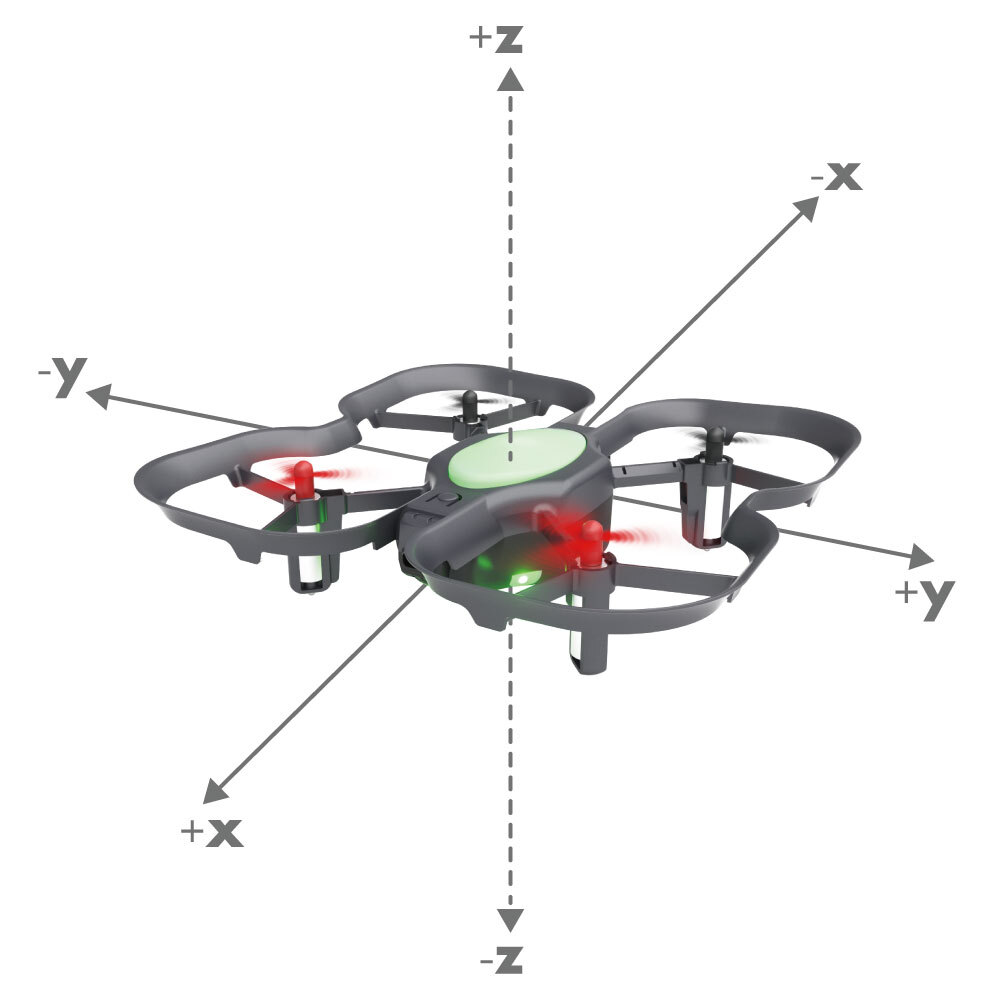
The 'x' position of the drone is forwards and reverse.
The 'y' position of the drone is left and right.
The 'z' position of the drone is up and down.
Syntax#
get_position_data()
get_position_data(delay)
Parameters#
delay: the delay in seconds before the position data is returned. default value is 0.01
Returns#
A list of position data for the drone. The list contains the current time of the running program [0], x position data [1], y position data [2], z position data [3].