reset_sensor()
Block#

Description#
Resets the Gyroscope angles to 0. Make sure the drone is on a flat surface when running this block.
Parameters#
None
Returns#
None
Example#
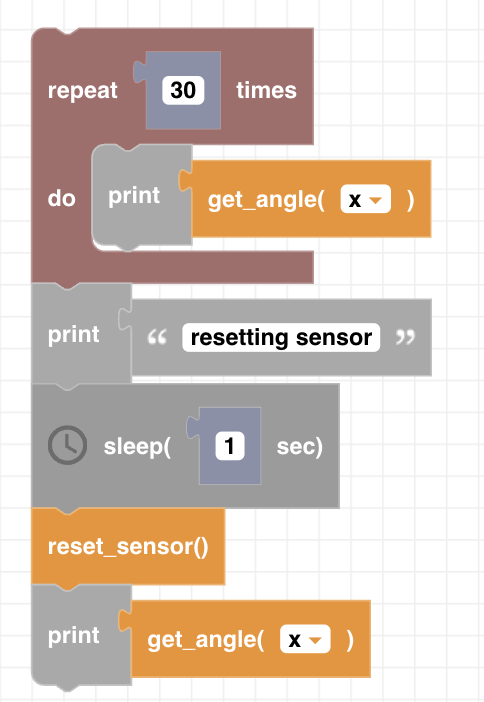
To use this example file turn the drone manually with your hand and watch the Z angle change. Stop moving the drone during the reset. You will see that the Z angle is reset to 0.