Swarm Function Documentation
version 2.8 (Changelog)
Getting Started — Swarm
We recommend using no more than four (4) drones per computer. To use this feature, you should have some experience with Python and feel comfortable using an IDE (integrated development environment). Support for Python for Robolink in the browser is not yet supported. Content coming soon!
What is Swarm?
Swarm is a coordinated and programmed process where drones perform a sequence of drone movements, performing commands in parallel (at the same time) or sequentially (one after the other). This feature is now possible using the codrone-edu v2.2 or greater in PyCharm!
Requirements
In order to use the swarm feature, you must satisfy the following:
Device Requirements
- MacOS or Windows (*PyCharm Community is not supported on Chromebooks)
- NOTE: Swarm feature is only available on MacOS and Windows due to swarm feature currently being available on PyCharm Community only.
- USB hub with 2 or more USB-A ports for connecting multiple controllers or multiple onboard USB-A ports on your computer.
Software Requirements
- Desktop IDE (we recommend PyCharm Community Edition).
- Python interpreter version 3.8 or higher installed, preferably a recent version of Python.
codrone-eduPython library, version 2.2 or newer, preferably the most recent version of the Python library.
Recommendations
For the best experience using the swarm feature, we recommend certain materials and a baseline level of programming experience. These tools and skills help ensure smoother setup, better flight accuracy, and effective troubleshooting:
Recommended Materials & Experience
- Robolink Programming Mat - improves flight consistency and positioning accuracy
- For more information, follow the links below:
- Aerial Drone Competition Mat - works as an alternative
- Experience with Python programming
- Understanding of Python classes, nested lists, and CoDrone EDU Python functions
- Educator experience (if using in a classroom setting)
Importing swarm Module
Before beginning, make sure you have installed the latest version of codrone-edu.
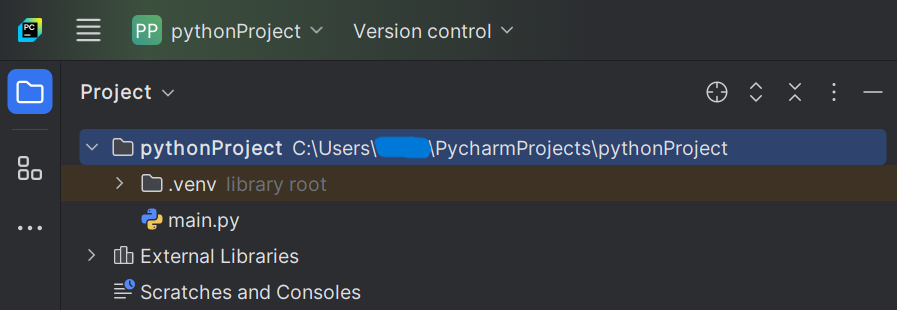
Create a new Python file to start programming a swarm:
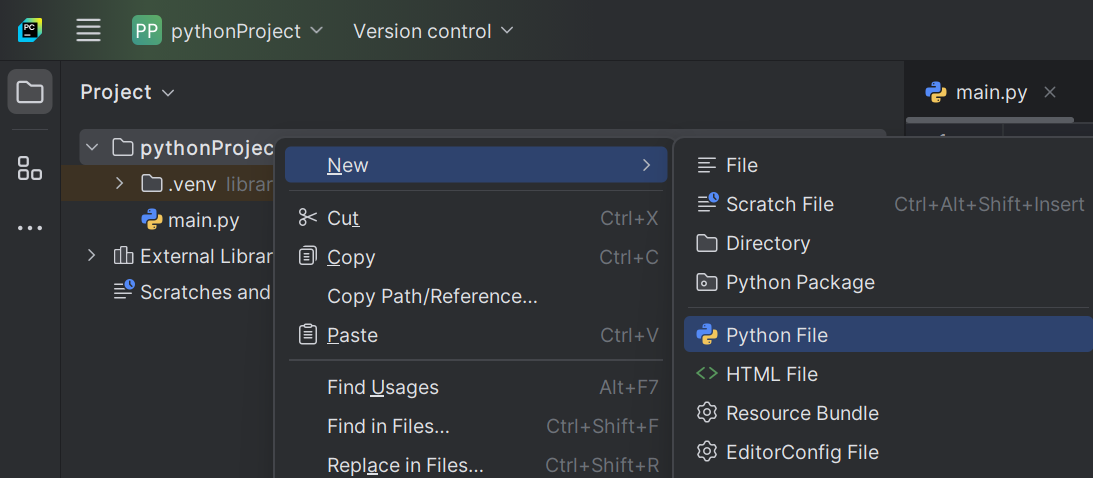
- Create a new Python file by right-clicking on the project name (highlighted in blue in image below) that is on the left side of the PyCharm window. Click on "New" > "Python File". A mini pop-up window will appear.
- Type the name of your Python file and make sure the "Python file" option is selected on the mini pop-up window. Now, the new Python file will be created, so you can start coding.
- On the first line, type:
from codrone_edu.swarm import *
Using swarm module
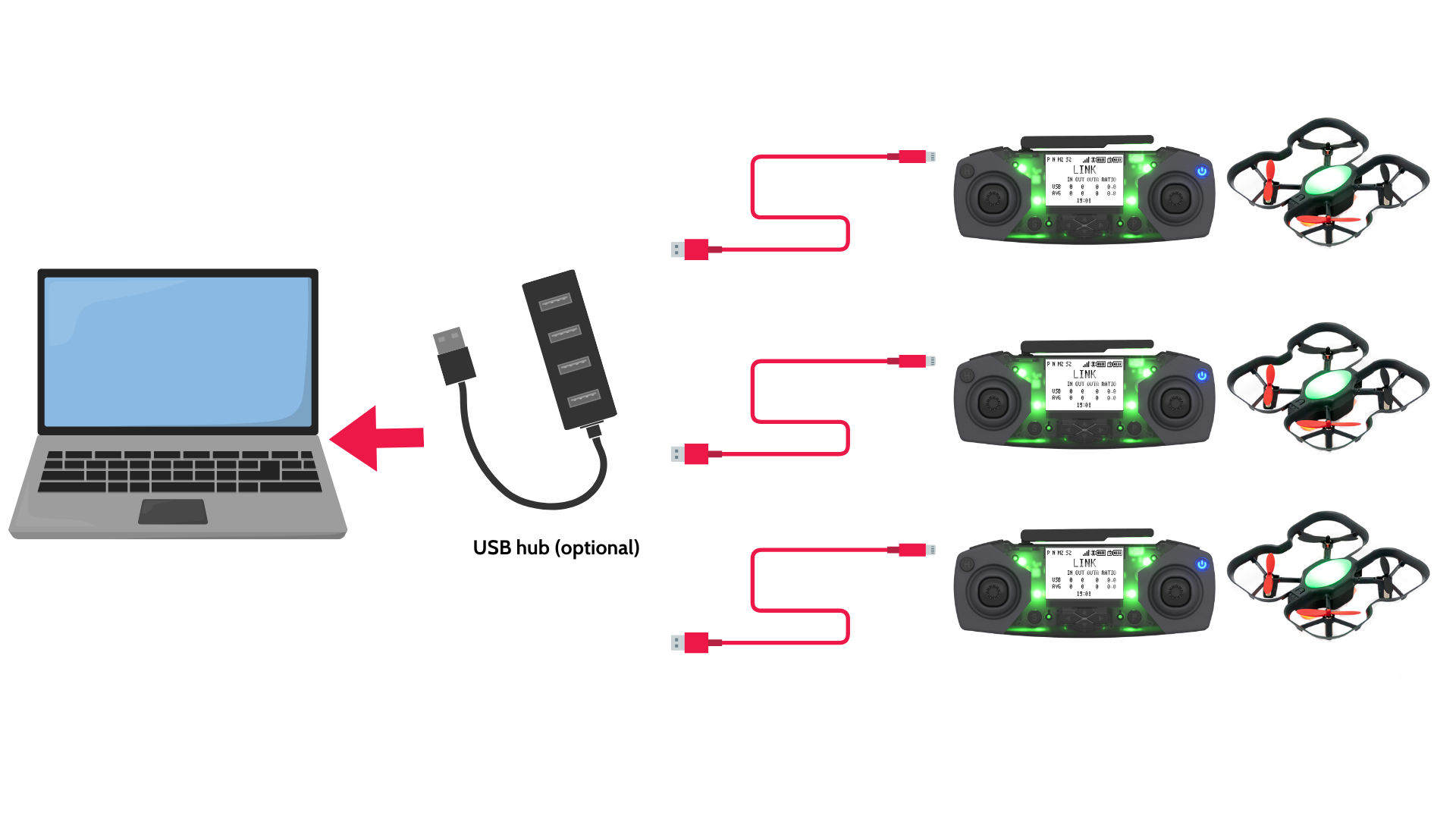
Before we start running any swarm code, you should have at least 2 USB ports to connect the CoDrone EDU controllers to program CoDrone EDU drones and must follow these steps:
- If you are using a USB hub for swarm, connect your USB hub to your laptop.
- Connect your CoDrone EDU controllers to your laptop or USB hub if you are using one.
- Make sure your CoDrone EDU drones are on and paired with their respective controllers.
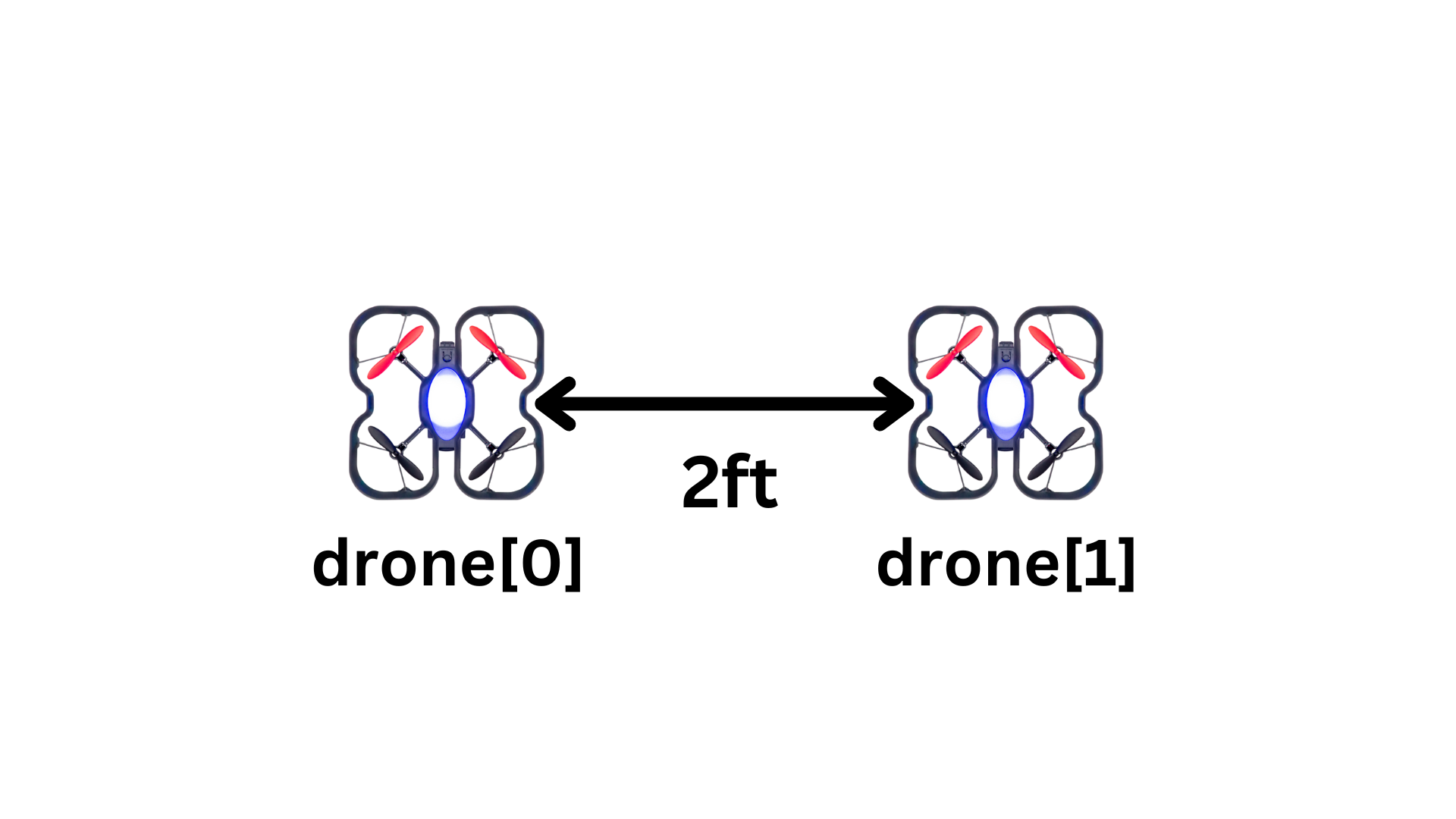
- Place the drones 2 feet from each other to avoid drones crashing into each other during takeoff.
- Run the code below. When running this code, click on the console below and press Enter to continue running the program. This prompt gives you time to fix your setup before you start running the full program.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.takeoff() # drones will take off at the same time
swarm.land() # drones will land at the same time
swarm.disconnect()
Swarm
Swarm()
Description
This will instantiate an object, creating an instance of the Swarm class, which is used to connect to multiple drones and allow the connected drones to perform commands at the same time or different times.
Syntax
Swarm()
Swarm(enable_print=True)
Swarm(enable_pause=True)
Swarm(enable_color=True, enable_print=True)
Swarm(enable_color=True, enable_print=True, enable_pause=True)
Parameters
boolean enable_color: If True, when using swarm.connect(), the each drone will be assigned a different LED color to distinguish from each other. By default, this is set to True.
boolean enable_print: If this value is True and enable_color is True, when using swarm.connect(), the console prints the assigned color and index of each drone. The index is important when using swarm.run_drone() for running drone commands for a given drone or using sequence.add() for scheduling commands for a given drone. By default, this is set to True.
boolean enable_pause: If True, when using swarm.connect(), the console will wait for the user to press Enter in the console to continue running the program. This is useful when the user needs time to fix their set-up. By default, this is set to True.
Returns
Swarm swarm object: This returns a swarm object that allows the user to connect to multiple drones and run drone commands.
Example Code 1
No setup is required. Place the drones on the table, and observe the console output for this example.
from codrone_edu.swarm import * # this line is required!
swarm = Swarm() # enable_print, enable_color, and enable_pause are set to True by default
swarm.connect()
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 100%
Connected to CoDrone EDU.
Battery = 90%
Drone 0 at port COM16: red
Drone 1 at port COM22: blue
Press Enter to start swarm...
'''
swarm.disconnect()
Example Code 2
No setup is required. Place the drones on the table, and observe the console output for this example.
from codrone_edu.swarm import *
swarm = Swarm(enable_print=False)
swarm.connect() # same result if enable_color=False (even if enable_print=True)
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 100%
Connected to CoDrone EDU.
Battery = 90%
Press Enter to start swarm...
'''
swarm.disconnect()
Example Code 3
No setup is required. Place the drones on the table, and observe the console output for this example.
from codrone_edu.swarm import *
swarm = Swarm(enable_pause=False)
swarm.connect() # doesn't pause the program
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 100%
Connected to CoDrone EDU.
Battery = 90%
Drone 0 at port COM16: red
Drone 1 at port COM22: blue
'''
swarm.disconnect()
swarm.connect()
Description
This function connects all of the CoDrone EDU controllers with the program.
Syntax
swarm.connect()
Parameters
None
Returns
None
Example Code
from codrone_edu.swarm import * # this line is required!
swarm = Swarm() # creates Swarm object, also required
swarm.connect() # connects with controllers
swarm.disconnect()
swarm.disconnect()
Description
This function disconnects all of the CoDrone EDU controllers from the program.
Syntax
swarm.disconnect()
Parameters
None
Returns
None
Example Code
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.disconnect() # disconnects controllers from the program
swarm.run_drone()
Description
This function runs a Drone function for only one drone in the swarm. To view the available Drone functions, head to this page in our documentation site!
Syntax
run_drone(index, method_name, *args, **kwargs)
Parameters
int index: index of desired Drone that will execute Drone function
string method_name: name of Drone function (command) that will be executed
*args: value(s) for the parameter of the given Drone function. If there are multiple parameters required for the Drone function, each value must be separated by a comma
**kwargs: value(s) for the parameter of the given Drone function, in form of parameter=value.
Returns
Depending on what Drone function you are calling, it will return the value of that function. For example, if method_name is "get_position_data", run_drone() will return a list of the drone's position data since get_position_data() returns a list of a drone's position data. Also, if method_name is "get_battery", run_drone() will return an integer value of the drone's battery since get_battery() returns an integer value of a drone's battery.
Example Code 1
No setup needed for the drones. Place two drones on the table. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Verify that drone 0 ran set_drone_LED() command.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.run_drone(0, "set_drone_LED", 255, 255, 0, brightness=255)
# index: 0
# method_name: "set_drone_LED"
# *args: 255, 255, 0
# **kwargs: brightness=255
# *args and **kwargs are not required unless the Drone function requires certain parameters to be inputted. In this case, set_drone_LED() does require all of the parameters. NOTE: The run_drone() commands in Example 1, 2, and 3 do the same thing.
swarm.disconnect()
Example Code 2
No setup needed for the drones. Place two drones on the table. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Verify that drone 0 ran set_drone_LED() command.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.run_drone(0,"set_drone_LED", 255, 255, 0, 255)
# index: 0
# method_name: "set_drone_LED"
# *args: 255, 255, 0, 255
# **kwargs:
swarm.disconnect()
Example Code 3
No setup needed for the drones. Place two drones on the table. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Verify that drone 0 ran set_drone_LED() command.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.run_drone(0,"set_drone_LED", r=255, g=255, b=0, brightness=255)
# index: 0
# method_name: "set_drone_LED"
# *args:
# **kwargs: r=255, g=255, b=0, brightness=255
swarm.disconnect()
Example Code 4
No setup needed for the drones. Place two drones on the table. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Verify that drone 1 ran get_position_data() command.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
print(swarm.run_drone(1, "get_position_data"))
# index: 1
# method_name: "get_position_data"
# *args:
# **kwargs:
swarm.disconnect()
Example Code 5
Place two drones on the floor 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Verify that drone 0 and drone 1 ran get_pressure() command.
from codrone_edu.swarm import *
swarm = Swarm(enable_pause=False)
swarm.connect()
swarm.takeoff()
height0 = swarm.run_drone(0, "get_pressure")
# index: 0
# method_name: "get_pressure"
# *args:
# **kwargs:
height1 = swarm.run_drone(1, "get_pressure")
# index: 1
# method_name: "get_pressure"
# *args:
# **kwargs:
print("height0:", height0)
print("height1:", height1)
swarm.land()
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 54%
Connected to CoDrone EDU.
Battery = 82%
Drone 0 at port COM16: red
Drone 1 at port COM22: blue
Press Enter to start swarm...
height0: 98667.48
height1: 98666.98
'''
swarm.disconnect()
swarm.drone_functions()
Description
Any function that belongs in the Drone class can be used as a Swarm function with similar syntax. Using the swarm.drone_function() syntax will execute the given Drone function, in parallel (at the same time), for all drones in the swarm. To view the available Drone functions, head to this page in our documentation site!
Syntax
drone_function()
drone_function(*args, **kwargs)
Parameters
*args: value(s) for the parameter of the given Drone function. If there are multiple parameters required for the Drone function, each value must be separated by a comma
**kwargs: value(s) for the parameter of the given Drone function, in form of parameter=value
Returns
list list of data: A list of drone data from each drone. The drone data can be a list, integer, float, etc. depending on what Drone function you are calling. For example, swarm.get_position_data() will return a list of each of the drones' position data, which are also lists. swarm.get_battery() will return a list of each of the drones' battery, which are integers.
Example Code 1
Place however many drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
All drones will take off, land, and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.takeoff() # drones will take off at the same time
swarm.land() # drones will land at the same time
swarm.disconnect()
Example Code 2
Place however many drones 2 feet away from each other. Make sure drones have enough space to move forward and left. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
All drones will take off, move at 20% pitch and -20% roll power for 2 seconds, move at 50% yaw power for 3 seconds, and finally land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.takeoff()
swarm.set_pitch(20) # pitch variable for all drones will be set to 20
swarm.set_roll(-20) # roll variable for all drones will be set to -20
swarm.move(2) # all drones move at 20% pitch and -20% roll power for 2 seconds
swarm.set_pitch(0) # pitch variable for all drones will be set to 0
swarm.set_roll(0) # roll variable for all drones will be set to 0
swarm.set_yaw(50) # yaw variable for all drones will be set to 50
swarm.move(3) # all drones move at 50% yaw power for 3 seconds
swarm.land()
swarm.disconnect()
Example Code 3
Place however many drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
All drones will take off, turn left 90 degrees, hover for 3 seconds, turn right 30 degrees, and finally land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.takeoff()
swarm.turn_left() # all drones will make a 90 degree left turn
swarm.hover(3) # all drones will hover for 1 second in the air
swarm.turn_right(30, timeout=3) # all drones will make a 30 degree right turn with a 3 second timeout
swarm.land()
swarm.disconnect()
Example Code 4
No setup required. Use however many drones, and run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Rotate your drones with your hands to observe x-angle changes for each drone.
If printing or storing values from a function call like swarm.get_angle_x(), index 0 of the list will show drone 0's x-angle data, index 1 of the list will show drone 1's x-angle data, etc.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
for i in range(100):
x_angles = swarm.get_angle_x() # returns a list of x-angles for each drone
print(x_angles)
time.sleep(0.05)
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 43%
Connected to CoDrone EDU.
Battery = 91%
Drone 0 at port COM16: red
Drone 1 at port COM22: blue
Press Enter to start swarm...
[14, 0]
[21, -3]
[17, 10]
[2, 26]
[2, 31]
[2, 27]
[2, 27]
[21, 24]
[50, 23]
'''
swarm.disconnect()
Example Code 5
Use at least 4 drones, and run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Make sure drones have enough space to move forward and upward.
Run code and the swarm should follow this sequence of events: (1) drone 1 executes move_forward() (2) all drones execute turn_right() (3) drones with index >=1 execute move_forward() (4) drones 0-1 execute set_drone_LED_mode() w/ yellow blinking pattern (5) drones with even indices (including 0) execute set_controller_LED_mode() w/ yellow blinking pattern (6) drones 0-1 execute move_distance() (7) drone 1 executes move_backward()
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
swarm.takeoff()
# TIP #1: You can slice the Swarm object just like a list, but
# the resulting object will not be a Swarm object. It will
# become a SwarmFragment, which contains the drones that have
# their drone indices within the range of the slice.
# TIP #2: SwarmFragment's will not be able to use connect(),
# run_drone(), or run().
# TIP #3: Slicing a SwarmFragment will result in another
# SwarmFragment.
swarm[1].move_forward(50) # drone 1 executes move_forward()
swarm[:].turn_right(180) # all drones execute turn_right()
swarm[1:].move_forward(50) # drones with index >=1 execute move_forward()
swarm[:2].set_drone_LED_mode(255, 255, 0, "blink", 7) # drones 0-1 execute set_drone_LED_mode()
swarm[::2].set_controller_LED_mode(255, 255, 0, "blink", 7) # drones with even index (inc. 0) execute set_controller_LED_mode()
swarm[0:2:1].move_distance(0,0,0.5,0.5) # drones 0-1 execute move_distance()
swarm[:][1].move_backward(50) # drone 1 executes move_backward()
swarm.land()
swarm.disconnect()
swarm.run()
Description
Runs each of the drone's sequences independently, at the same time, or runs each of the drone's sequences one by one.
Syntax
run(sync_obj)
run(sync_obj, type="parallel", delay=None, order=None)
Parameters
Sync sync_obj: Sync object that will be executed.
string type: Type of synchronization: "parallel" and "sequential". By default, type="parallel". If type="parallel", drones will individually execute their scheduled commands at the same time. If "sequential", drones execute commands one by one.
float delay: Delay between drone commands, if type="sequential".
list order: order of execution between drones, if type="sequential".
An example of the structure of order is:
[[0,1,3,4,2],[4,3,2,1,0],[0,1,2,3,4]]
- The ith-nested list represents the order of execution for the drones' ith task
- The 1st nested list will run drone 0's 1st command, then drone 1's 1st command, then drone 3's 1st command, then drone 4's 1st command, and finally drone 2's 1st command
- The 2nd nested list will run drone 4's 2nd command, then drone 3's 2nd command, then drone 2's 2nd command, then drone 1's 2nd command, and finally drone 0's 2nd command
- The 3rd nested list will run drone 0's 3rd command, then drone 1's 3rd command, then drone 2's 3rd command, then drone 3's 3rd command, and finally drone 4's 3rd command
- If a drone has less commands than others, the drone will hover instead.
Returns
list drone data: 2D list of drone data from each drone for every command ran. This list is relevant if one of the commands for any drone returns drone data. swarm.run() doesn't need to be stored in a variable if necessary.
This is the general structure of the 2D list:
[[drone_0_value, drone_1_value,...,drone_n_value], --> list of return values from each drone's 1st command
[drone_0_value, drone_1_value,...,drone_n_value], --> list of return values from each drone's 2nd command
,...,
[drone_0_value, drone_1_value,...,drone_n_value]] --> list of return values from each drone's nth command
Example Code
Place two drones 2 feet away from each other, facing the same direction. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Both drones take off. Each drone will independently run their sequence of commands. Finally, both drones land and disconnect.
from codrone_edu.swarm import *
# First, create Sequence instances for each drone (or drone index)
sequence_0 = Sequence(0)
sequence_0.add('get_battery')
sequence_0.add('set_pitch', 20)
sequence_0.add('set_throttle', power=20)
sequence_0.add('move',2.5)
sequence_0.add('get_position_data')
sequence_1 = Sequence(1)
sequence_1.add('get_battery')
sequence_1.add('set_pitch', -20)
sequence_1.add('set_throttle', power=35)
sequence_1.add('move',4)
sequence_1.add('get_position_data')
sequence_1.add('set_pitch', 20)
sequence_1.add('set_throttle', power=-20)
sequence_1.add('move',2.5)
sequence_1.add('get_battery')
# store sequences in Sync object
choreography = Sync(sequence_0, sequence_1)
# create Swarm instance and all drones are connected
swarm = Swarm()
swarm.connect()
# all drones takeoff
swarm.takeoff()
# run synchronization, drones execute their tasks individually
result = swarm.run(choreography) # returns 2D list containing return values from each drone
swarm.land()
print(result)
'''
Console Output:
Running codrone-edu library version 2.8
Connected to CoDrone EDU.
Battery = 43%
Connected to CoDrone EDU.
Battery = 91%
Drone 0 at port COM16: red
Drone 1 at port COM22: blue
Press Enter to start swarm...
[[26, 80],
[None, None],
[None, None],
[None, None],
[[13.884961605072021, 0.4637690782546997, -0.234191432595253, 0.20280465483665466], [13.884961605072021, 0.03511320427060127, -0.03844326362013817, 0.5322286486625671]],
[None, None],
[None, None],
[None, None],
[None, 67]]
'''
swarm.disconnect()
swarm.print()
Description
This function prints information about each drone. There are different format that the user can print information about the swarm: "raw" or "readable". "raw" will print a list of the Drone objects in the swarm: you will see the class name Drone and memory address of each Drone object in this format. "readable" prints readable and detailed information about each drone in the swarm: you will see which drone index is on which port and LED color (if enable_color=True).
Syntax
print()
print(format="raw")
Parameters
string format: the format at which swarm information is printed, "raw" or "readable". By default, "raw" is the format.
Returns
None
Example
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect(enable_pause=False)
swarm.print(format="raw")
swarm.print(format="readable")
swarm.disconnect()
Sequence
Sequence()
Description
This instantiates an object, creating an instance of the Sequence class, which is used to schedule a sequence of drone commands for a given drone. To learn more about its function, read this section.
Syntax
Sequence(index)
Parameters
integer index: The index of the drone. To view drone indices, enable_print and enable_color must be set to True for the Swarm object.
Returns
Sequence sequence object: A sequence object that can schedule drone commands for a given drone.
Example Code
Place two drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Both drones take off. One drone (drone 0) turns left 45 degrees while the other (drone 1) turns left 90 degrees. Since drone 1 finished running its commands, drone 1 hovers while drone 0 turns right 90 degrees. Finally, both drones land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm() # enable_print, enable_color, and enable_pause are set to True by default
swarm.connect() # displays drone indices and LED color
sequence_0 = Sequence(0) # store Sequence object that will schedule drone commands for drone 0 in a variable
sequence_0.add('turn_left', 45)
sequence_0.add('turn_right', degree=90)
sequence_1 = Sequence(1) # store Sequence object that will schedule drone commands for drone 1 in a variable
sequence_1.add('turn_left')
choreography = Sync(sequence_0, sequence_1)
swarm.takeoff()
swarm.run(choreography)
swarm.land()
swarm.disconnect()
sequence.add()
Description
This function adds a drone command to be scheduled in the sequence.
Syntax
add(method_name, *args, **kwargs)
Parameters
string method_name: name of Drone function (command) to be scheduled
*args: value(s) for the parameter of the given Drone function. If there are multiple parameters required for the Drone function, each value must be separated by a comma
**kwargs: value(s) for the parameter of the given Drone function, in form of parameter=value.
Returns
None
Example Code
Place two drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Both drones take off. One drone (drone 0) turns left 45 degrees while the other (drone 1) turns left 90 degrees. Since drone 1 finished running its commands, drone 1 hovers while drone 0 turns right 90 degrees. Finally, both drones land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
sequence_0 = Sequence(0)
sequence_0.add('turn_left', 45) # drone 0 is scheduled to run turn_left(45)
sequence_0.add('turn_right', degree=90) # drone 0 is scheduled to run turn_right(90) after turn_left(45)
sequence_1 = Sequence(1)
sequence_1.add('turn_left') # drone 1 is scheduled to run turn_left(90)
choreography = Sync(sequence_0, sequence_1)
swarm.takeoff()
swarm.run(sync)
swarm.land()
swarm.disconnect()
sequence.print()
Description
This function prints information about the Sequence object. There are different format that the user can print information about the Sequence object: "raw" or "readable". "raw" will print a dictionary: in this format, the dictionary consists of a key indicating the drone index and the value indicating the list of the commands scheduled. "readable" prints a readable version of the drone index and list of commands scheduled.
Syntax
print()
print(format="raw")
Parameters
string format: the format at which sequence information is printed, "raw" or "readable". By default, "raw" is the format.
Returns
None
Example
from codrone_edu.swarm import *
sequence = Sequence(2) # Sequence object for drone index 2
sequence.add('move_distance', -0.5, 0, 0, 0.5)
sequence.add('move_distance', 0.5, 0, 0, 0.5)
sequence.print("raw") # {2: [['move_distance', -0.5, 0, 0, 0.5], ['move_distance', 0.5, 0, 0, 0.5]]}
sequence.print("readable")
Sync
Sync()
Description
This instantiates an object, creating an instance of the Sync class, which is used to store Sequence objects from each drone in order to synchronize the drones with swarm.run(). To learn more about its function, read this section.
Syntax
Sync(*args)
Parameters
*args: Sequence object(s). If there are multiple Sequence objects to be added, each value must be separated by a comma. Can store however many the user needs.
Returns
Sync sync object: A sync object that stores multiple Sequence objects that are assigned to drones. Ready to be used with swarm.run().
Example Code
Place two drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
Both drones take off. One drone (drone 0) turns left 45 degrees while the other (drone 1) turns left 90 degrees. Since drone 1 finished running its commands, drone 1 hovers while drone 0 turns right 90 degrees. Finally, both drones land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
sequence_0 = Sequence(0)
sequence_0.add('turn_left', 45)
sequence_0.add('turn_right', 90)
sequence_1 = Sequence(1)
sequence_1.add('turn_left')
choreography = Sync(sequence_0, sequence_1)
# inputs however many sequences needed
# stores sequences/schedules for drone 0 and drone 1
swarm.takeoff() # all drones take off
swarm.run(sync) # executes scheduled drone commands in sync object for drone 0 and 1 at the same time
swarm.land() # all drones land
swarm.disconnect()
sync.add()
Description
This function adds a sequence in the Sync object.
Syntax
add(sequence_obj)
Parameters
Sequence sequence_obj: The Sequence object to be added.
Returns
None
Example Code
Place 3 drones 2 feet away from each other. Run the program. Observe the console output, verify which drone was assigned which color and index, and fix set up if needed. Press Enter in the console to continue running swarm program.
All drones take off. One drone (drone 0) turns left 45 degrees, another drone (drone 1) turns left 90 degrees, and the remaining drone (drone 2) sets drone LED to the color yellow. Since drone 1 and 2 finished running their commands, drone 1 and 2 hover while drone 0 turns right 90 degrees. Finally, all drones land and disconnect.
from codrone_edu.swarm import *
swarm = Swarm()
swarm.connect()
sequence_0 = Sequence(0)
sequence_0.add('turn_left', 45)
sequence_0.add('turn_right', degree=90)
sequence_1 = Sequence(1)
sequence_1.add('turn_left')
sequence_2 = Sequence(2)
sequence_2.add('set_drone_LED', 255,255,0,255)
choreography = Sync(sequence_0, sequence_1)
sync.add(sequence_2) # adds sequence for drone 2
swarm.takeoff()
swarm.run(choreography)
swarm.land()
swarm.disconnect()
sync.print()
Description
This function prints information about the Sync object. There are different format that the user can print information about the Sync object: "raw" or "readable". "raw" will print a dictionary: in this format, the dictionary consists of a key(s)indicating the drone index/indices and the value of each key indicating the list of the commands scheduled for that drone index. "readable" prints a readable version of the drone inddices and their list of commands scheduled.
Syntax
print()
print(format="raw")
Parameters
string format: the format at which sync information is printed, "raw" or "readable". By default, "raw" is the format.
Returns
None
Example
from codrone_edu.swarm import *
sequence0 = Sequence(0) # Sequence object for drone index 0
sequence0.add('hover', 1)
sequence0.add('turn_right')
sequence2 = Sequence(2) # Sequence object for drone index 2
sequence2.add('move_distance', -0.5, 0, 0, 0.5)
sequence2.add('move_distance', 0.5, 0, 0, 0.5)
choreography = Sync(sequence0, sequence2)
# what choreography.print("raw") prints:
# {0: [['hover', 1], ['turn_right']], 2: [['move_distance', -0.5, 0, 0, 0.5], ['move_distance', 0.5, 0, 0, 0.5]]}
choreography.print("raw")
choreography.print("readable")