send_absolute_position()
Description#
Sends a movement command to the drone based on its absolute position from its takeoff location. Note: A sleep command for the length of the movement may be needed after using this movement command.
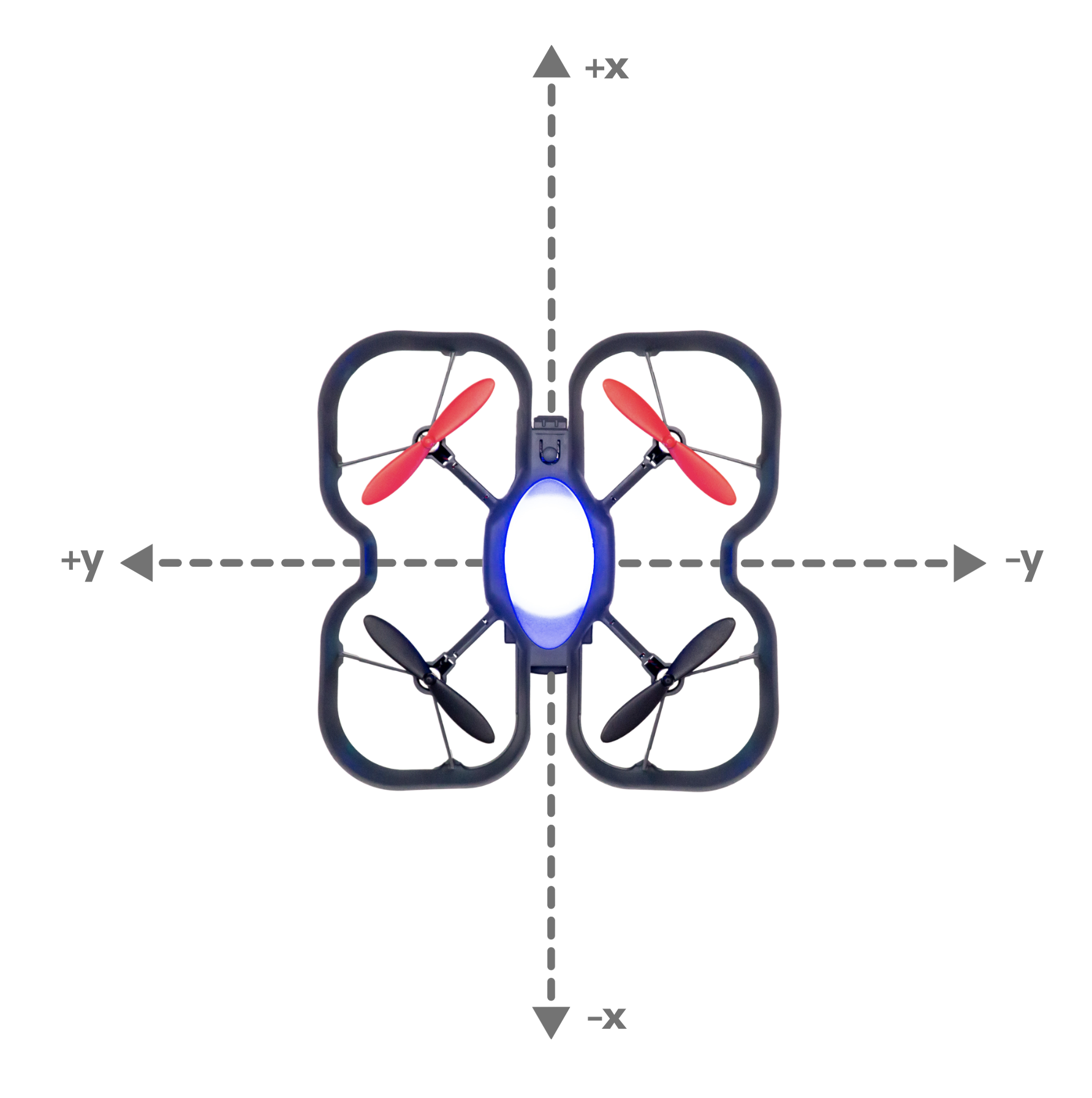
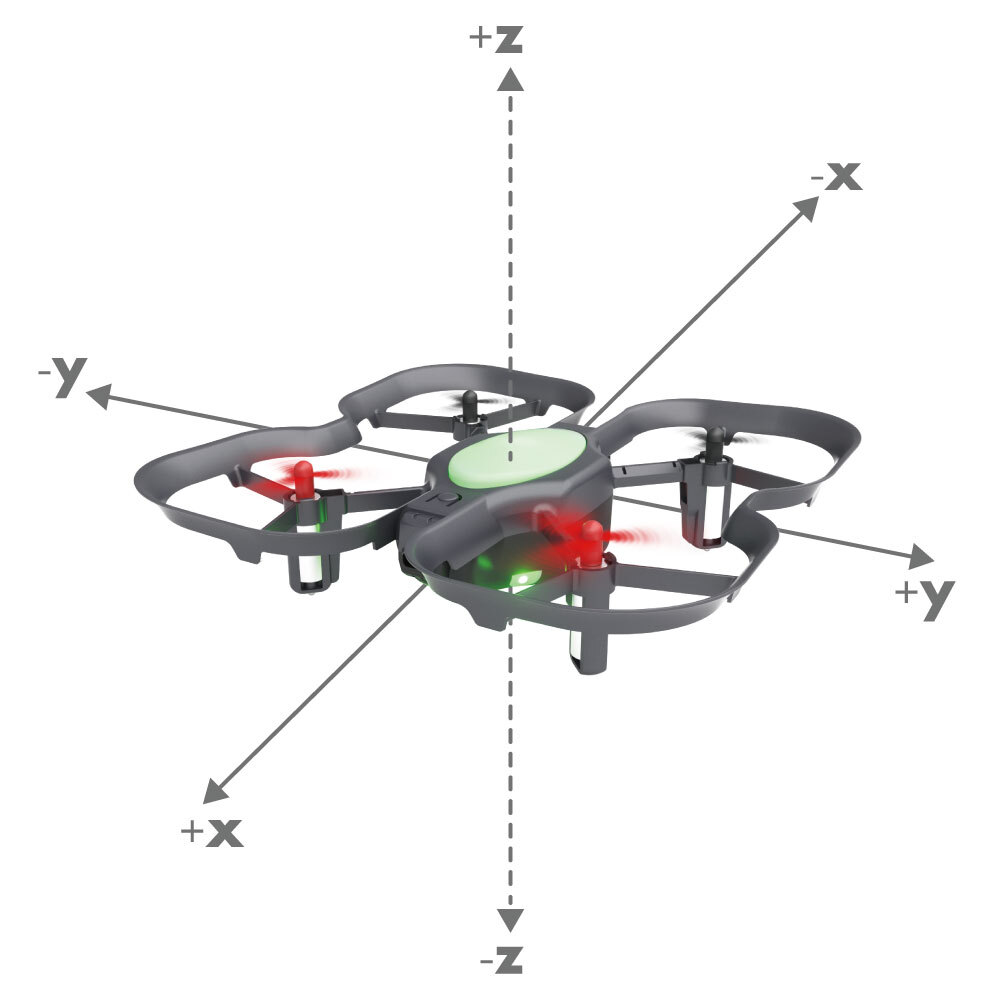
The 'x' position of the drone is forwards and reverse.
The 'y' position of the drone is left and right.
The 'z' position of the drone is up and down.
Syntax#
send_absolute_position(positionX, positionY, positionZ, velocity, heading, rotationalVelocity)
Parameters#
positionX: Float value from -10 ~ 10 meters. The X position of the drone. Forward is positive. Backwards is negative.
positionY: Float value from -10 ~ 10 meters. The Y position of the drone. Left is positive. Right is negative.
positionZ: Float value from -10 ~ 10 meters. The Z position of the drone. Up is positive. Down is negative.
velocity: Float value from 0.5 ~ 10 meters per second. The movement speed of the drone.
heading: Integer value from -360 - 360 degrees. Positive turns the drone left. Negative turns the drone right.
rotationalVelocity: Integer value from 0 - 360 degrees per second. Left and right rotation speed of the drone.
Returns#
None